
metadata
tags:
- ultralyticsplus
- yolov8
- ultralytics
- yolo
- vision
- object-detection
- pytorch
- visdrone
- uav
library_name: ultralytics
library_version: 8.0.43
inference: false
model-index:
- name: mshamrai/yolov8s-visdrone
results:
- task:
type: object-detection
metrics:
- type: precision
value: 0.40755
name: mAP@0.5(box)
license: openrail
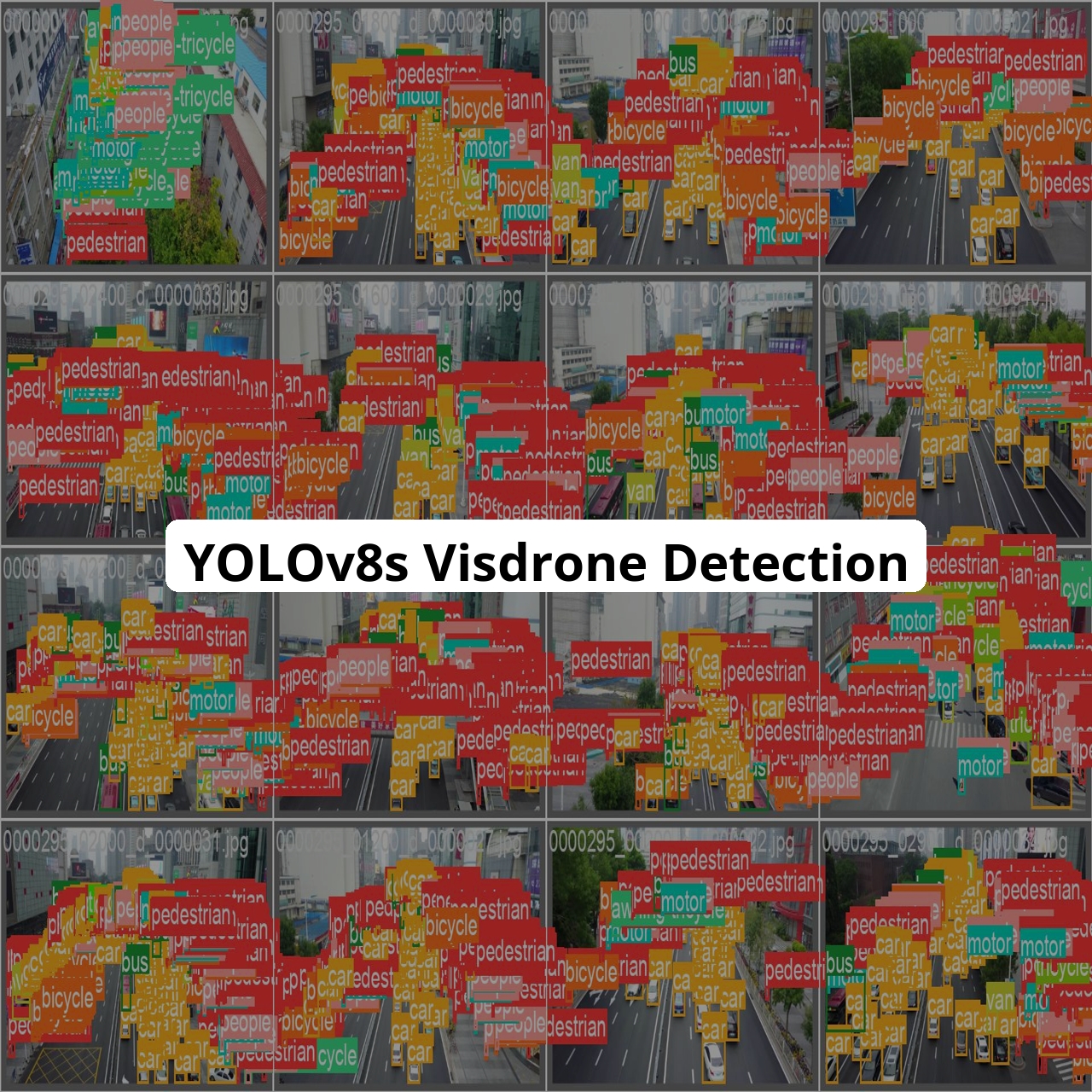
Supported Labels
['pedestrian', 'people', 'bicycle', 'car', 'van', 'truck', 'tricycle', 'awning-tricycle', 'bus', 'motor']
How to use
- Install ultralyticsplus:
pip install ultralyticsplus==0.0.28 ultralytics==8.0.43
- Load model and perform prediction:
from ultralyticsplus import YOLO, render_result
# load model
model = YOLO('mshamrai/yolov8s-visdrone')
# set model parameters
model.overrides['conf'] = 0.25 # NMS confidence threshold
model.overrides['iou'] = 0.45 # NMS IoU threshold
model.overrides['agnostic_nms'] = False # NMS class-agnostic
model.overrides['max_det'] = 1000 # maximum number of detections per image
# set image
image = 'https://github.com/ultralytics/yolov5/raw/master/data/images/zidane.jpg'
# perform inference
results = model.predict(image)
# observe results
print(results[0].boxes)
render = render_result(model=model, image=image, result=results[0])
render.show()